Tunnel Boring Machines (TBMs) are remarkable feats of engineering designed to excavate tunnels with a relative degree of speed, safety, and precision. Navigating through the earth’s subsurface, TBMs use a combination of advanced technologies and techniques to maintain their course and achieve their tunneling objectives.
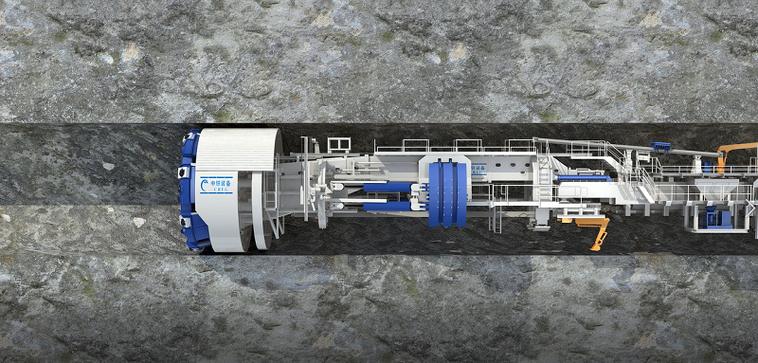
How do tunnel boring machines navigate?Here’s a detailed look at how TBMs navigate:
1. Guidance Systems
- Laser Guided Systems: Early TBMs often used laser guidance systems, which involve projecting a laser beam from the tunnel’s starting point to the TBM. The machine is then equipped with sensors that can detect the laser beam and adjust the machine’s position accordingly to maintain alignment with the laser.
- Inertial Navigation Systems (INS): More modern TBMs often incorporate inertial navigation systems that use accelerometers and gyroscopes to track the TBM’s movement and orientation. These systems are less affected by environmental conditions and can provide continuous guidance without the need for external reference points.
2. Gyroscopes and Accelerometers: These devices help in determining the TBM’s orientation and movement. Gyroscopes measure the rate of rotation, while accelerometers measure changes in velocity.
3. Geodetic Control: Surveying equipment and methods are used to set and monitor the TBM’s alignment and ensure it stays on course. This includes:
- Total Stations: Measure angles and distances from fixed points on the surface to control the TBM’s trajectory.
- Reference Points: Fixed landmarks on the surface that are used to verify the TBM’s position.
4. Tunnel Profile Measurement: Sensors on the TBM measure the profile of the tunnel as it is bored, ensuring that it matches the design specifications. This includes:
- Profile Scanners: Detect any deviations from the planned tunnel profile.
- Convergence Measurement: Monitors the changes in the tunnel diameter to ensure stability and alignment.
5. Control Systems: TBMs have onboard computer systems that process data from the navigation and guidance systems, making real-time adjustments to the machine’s direction and angle. These systems can automatically adjust the TBM’s steering mechanisms to correct any deviations.
6. Communication Systems
- Underground Communication: Robust communication systems are essential for coordinating between the TBM crew and the surface team. This includes both voice and data communication to ensure that critical information is transmitted in real time.
The navigation of TBMs is a complex process that involves the integration of various technologies and techniques. From laser and inertial guidance systems to real-time monitoring and control, TBMs are designed to navigate through the earth with precision and efficiency.These systems work together to ensure that the TBM follows the planned alignment and reaches its destination accurately.